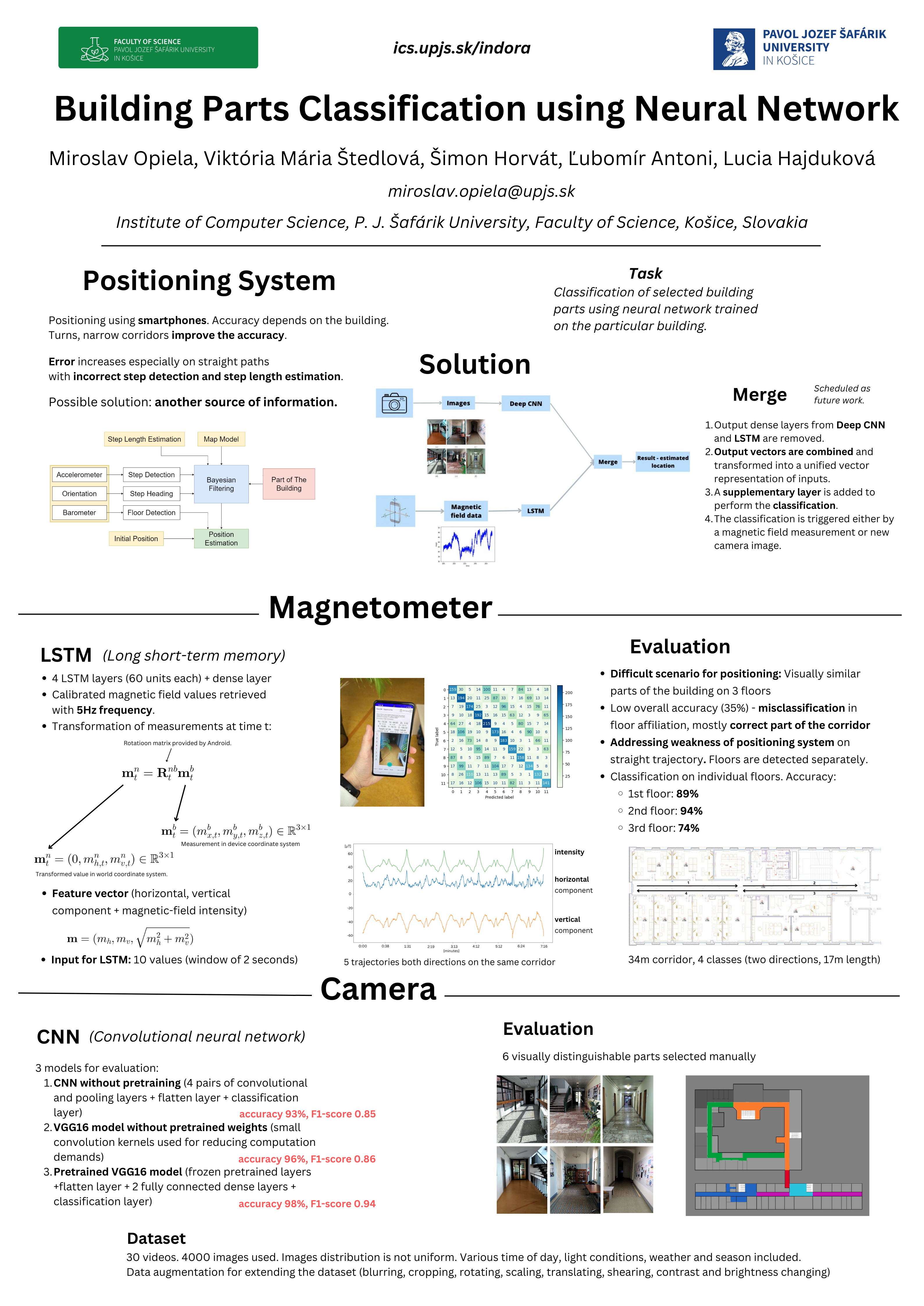
 Our positioning approach excels in scenarios with narrow corridors and lots of walk direction changes. However, the error increases along straight path. These methods based on neural networks address these situations.
Our positioning approach excels in scenarios with narrow corridors and lots of walk direction changes. However, the error increases along straight path. These methods based on neural networks address these situations.
LSTM is used on magnetometer measurements and CNN on camera images to classify the input. The goal is not in providing the exact location but to improve the existing positioning system by reducing possibilities of the current location estimation. The fusion of these networks is scheduled as future work.
See more:
- Building parts classification using neural network (IPIN 2023 conference, Work-in-Progress paper)
- Viktória Mária Štedlová – Utilization of neural network trained on particular building in indoor positioning. 2023, master thesis
- Lucia Hajduková – Camera-based indoor localization accuracy improvement. 2021, master thesis
- Poster (presentation)