 Most solutions for smartphone-based positioning use Kalman or particle filter to fuse inputs. Grid-based filters are determinstic implementations of bayes filters which some advantages in computation and the ability to cover the whole space. However, stochastic particle filter is more popular due to its lower computational cost.
Most solutions for smartphone-based positioning use Kalman or particle filter to fuse inputs. Grid-based filters are determinstic implementations of bayes filters which some advantages in computation and the ability to cover the whole space. However, stochastic particle filter is more popular due to its lower computational cost.
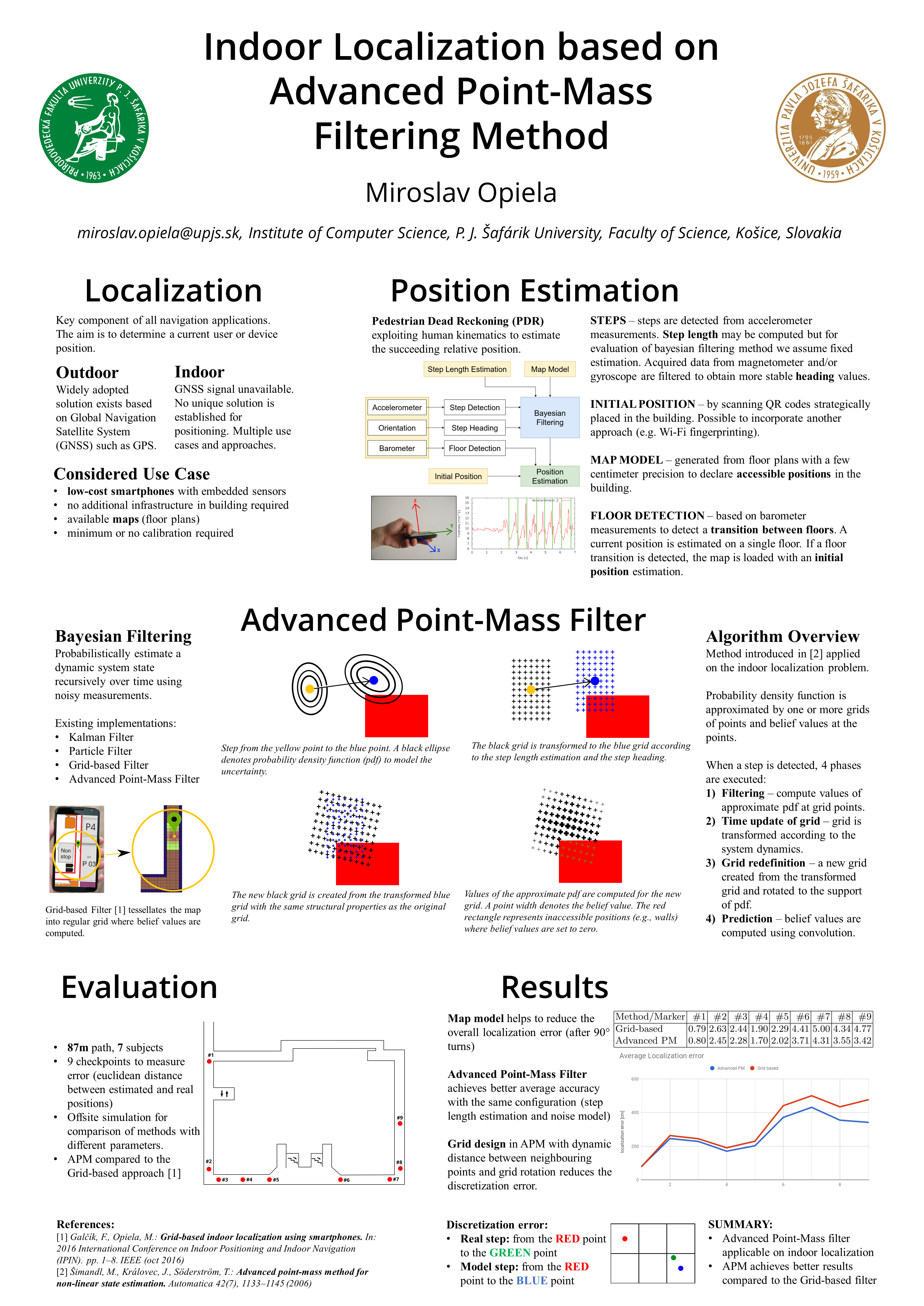
In our research, we explore the grid-based methods. Step-based approach (smartphone sensors, pedestriand dead reckoning) and maps are utilized to obtain the position. Moreover, experiments with Wi-Fi, floor transition detection, and activity recognition are incorporated in the system. The approach was tested on IPIN competitions.
See more:
- Opiela, Miroslav, and František Galčík. „Grid-based Bayesian filtering methods for pedestrian dead reckoning indoor positioning using smartphones.“ Sensors 20.18 (2020): 5343.
- Galčík, František, and Miroslav Opiela. „Grid-based indoor localization using smartphones.“ 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN). IEEE, 2016.
- Miroslav Opiela. Indoor Localisation using Smartphones. Dissertation thesis.
- Poster focused on advanced point-mass method